模糊PID控制方法是针对玻璃钢纤维的缠绕原理以及小车的自适应伺服系统而采用的,它解决了系统不确定因素造成的困扰,充分发挥了强鲁棒性的特点以及模糊控制器的优越性;同时根据快速伺服系统的特点突破了传统PID的限制,使伺服系统的动态响应速率和稳定程度得到了保障。模拟实验结果表明,采用该控制方法能够使伺服系统的性能和工作效率得到显著提高。
通过计算机辅助软件设计适应于机械式控制的两轴缠绕机线型和传动系统,解决由于制品规格和缠绕形式的改变而导致缠绕机线型和传动系统需要重新调整带来的不便。实验结果表明,计算机辅助设计软件能够大大缩短调整缠绕机所需要的时间,提高工作效率,并使设计更加精准、合理、科学。
从缠绕过程控制发展情况来看,缠绕过程依赖于多轴协调运动,所以提高系统稳定性和快速响应性是控制过程的关键环节。基于PMAC运动控制卡运算速度快、稳定、可靠的特点,构建IPC和PMAC运动控制卡控制系统,使用IPC处理弱实时任务,利用以DSP为核心的PMAC运动控制卡作为系统控制器,完成强实时任务。
在缠绕过程中,利用计算机控制的机器人手臂和手腕来控制缠绕工艺参数,如线型、张力和缠绕速度等,执行各种复杂线型的操作。自由度广、动作灵活、工艺范围广泛的机器人与缠绕机相结合,可以达到一般缠绕机无法实现的水平,如T型三通和其他异型零件,并完成检验质量、装载和卸载芯模等任务。

- 工业废气(臭气)净化处理
0评论2024-12-03

- 负荷计算与无功功率补偿全方位指南
0评论2024-07-19
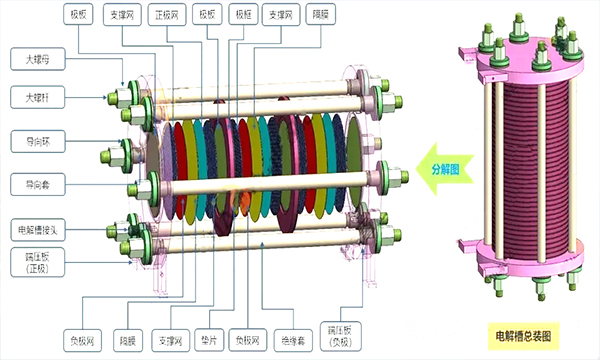
- 电解槽设备组件加工流程
0评论2024-07-19

- 电厂生物质燃料碳减排技术创新与应用研究
0评论2024-06-30
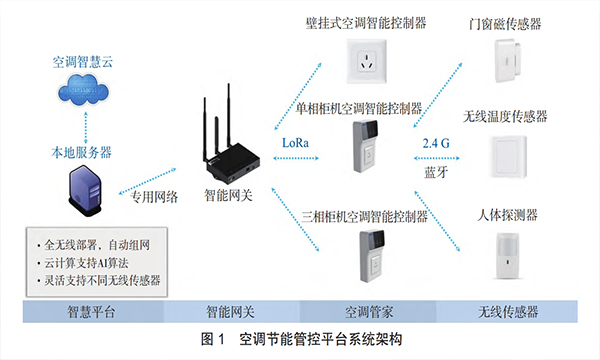
- 基于物联网和云计算技术的空调节能管控平台研究
0评论2024-06-28
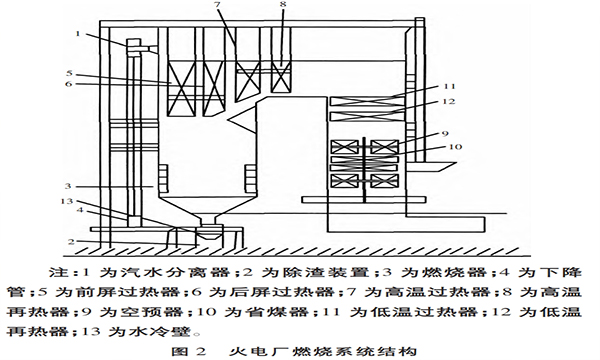
- 火电厂节能降耗技术分析及应用
0评论2024-06-26
- 建筑节能技术的应用
0评论2024-06-23
- 破解绿色甲醇/航油合成技术链中生物质气化焦油难题
0评论2024-05-15

- 甲醇高效节能精馏工艺技术的研究
0评论2023-11-30

- 城市路灯照明中节能技术的应用
0评论2023-03-30